Hi, I'm Limit!
Meet Limit!
Limit is a mobile robotics platform that is currently in active development. The goal: a powerful quadruped that allows for exploring Nvidia software, traversal, CUDA, Visualization and AI/ML workflows. "Limit" is capable of 360° Stereo Vision, LLM's, TTS, and more. The project has transitioned to use Docker deployments and AWS Websockets. Limit transitions easily to Isaac Simulator and Isaac Lab to make use of the latest cutting edge technologies in Reinforcement Learning. I designed and programmed Limit during my time in undergraduate.
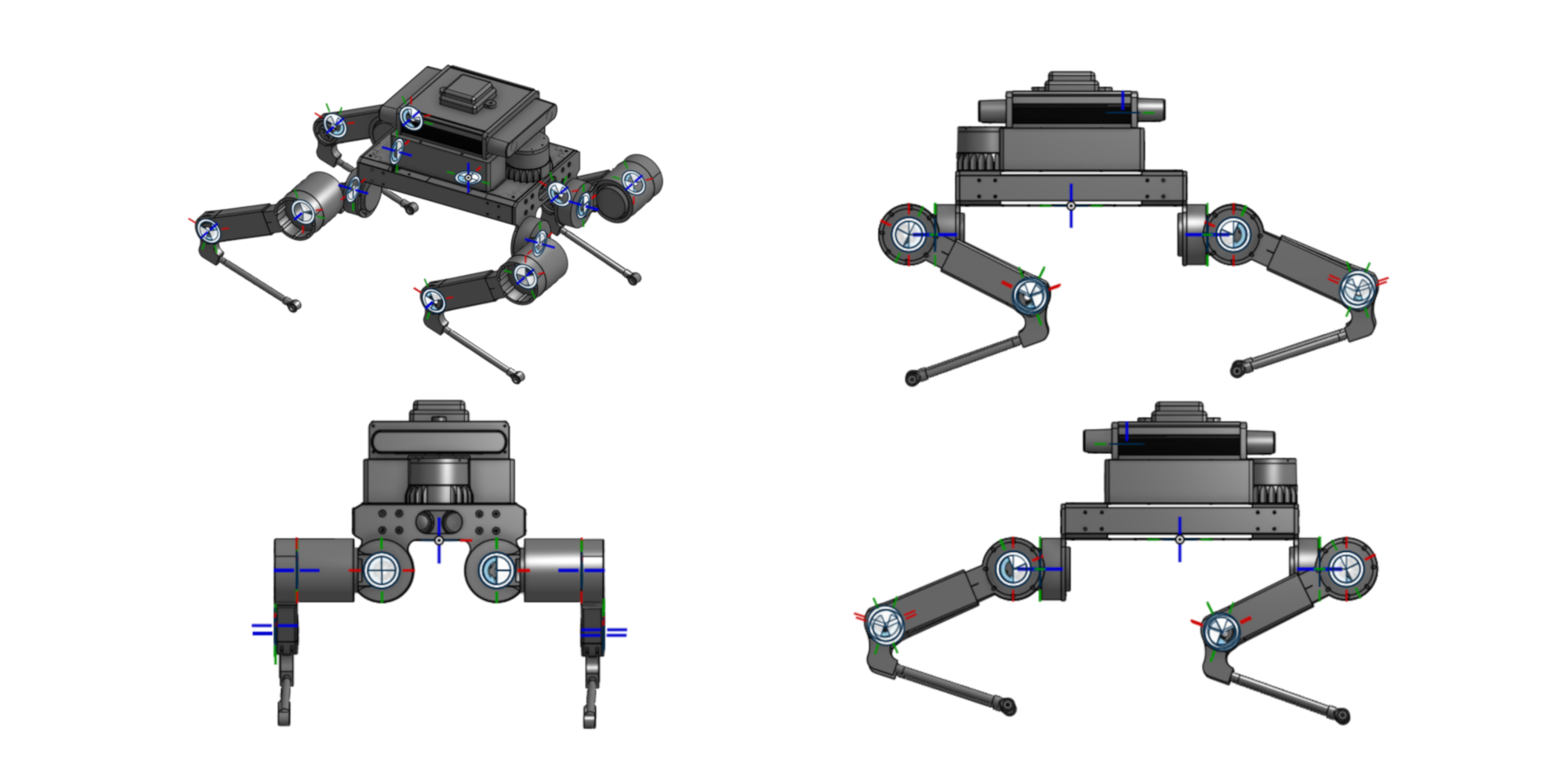
Design
Much of Limit's design is focused on developing autonomous systems and the modern vision systems that run them. With version 2.0 Limit is transitioning to the NVIDIA Jetson Thor platform with the following hardware changes: GPS-RTK, 2x-Zed2i, Ouster OS0 Lidar. Limit is 12-dof with brushless, geared motors with encoder feedback and is made from machined aluminum and carbon fiber. All sensor data passes via websocket and its own internet connection. I have been a long time advocate for Zed 2i stereo cameras due to the price vs performance ratio. The reason for choosing Zed has been: the robust nature of the documentation makes it pleasant to implement; visuals speak for themselves.
This intersection of NVIDIA Edge Computing, Advanced 3D Vision Systems, and Autonomous Navigation is rich with possibilities. As with many things in this space, change is unavoidable. The initial version of Limit was running on a Jetson AGX Orin until the release of Jetson Thor. As with anything, there are tradeoffs. In the transition I upgraded to 2070 FP4 TFLOPS of compute but lost my beloved pci expansion (previously allowing for 2x additional Zed 2i cameras). This is much of the reason for looking further into Lidar. The original documentation for the 4 stereo camera version of Limit on the AGX platform can be found here: Limit V1.
Latest Project Updates:
Limit is currently undergoing a massive transformation between V1 and V2. With the upgrade Limit will be running on the new Jetson Thor platform with state of the art Lidar and Stereo Vision Systems from Ouster. More information on the transition to Ouster is coming soon. Completed sections include docker deployments, Limit X Software Suite, Isaac Sim, Isaac Lab simulations. Development is focused on implementing the New Vision System for Jetson Thor, Inverse Kinematics, Gait calculations, TTS and API dashboards. After a year of development, Limit and Limit X software now exist and work together.
More information on the new vision system can be found here: Vision
More information on the "Limit X" software can be found here: Limit X Software
More information on "Limit" the quadruped can be found here: Limit Quadruped
More information on the platform can be seen in the dashboard: Dashboard